最新情報はこちらで確認してください
(この記事は2021/5/9現在の情報で、1BTC/6500000円で計算しています。)
あと、NiceHash Minerを使ったときの話です。
この記事の後、順調にマイニング効率が上がっていき一時日間1000円を越しましたが、イーロンのせいでBTCが暴落し、また日間1000円を下回りました(2021/5/13)
私は主にGTX1080Tiを使い、DaggerHashimotoというアルゴリズムでTRexというマイナーを動かしていますが、そのPayrateが定期的に大きく跳ね上がるからです。
↓一日平均のGTX1080Tiのみのマイニング結果 二枚目はシステム全体の結果


しかしながら、下にも画像を貼っておきますが瞬間的には0.15mBTC/24hぐらい掘れます。つまり、ギリギリ1000円/24hに行くか行かないかくらいの効率が出ます。
つまり、この最大効率が1日中続くように祈願していれば1日で1000円ほどマイニングできるかもしれません。
↓瞬間的にすごい効率になっているときの図

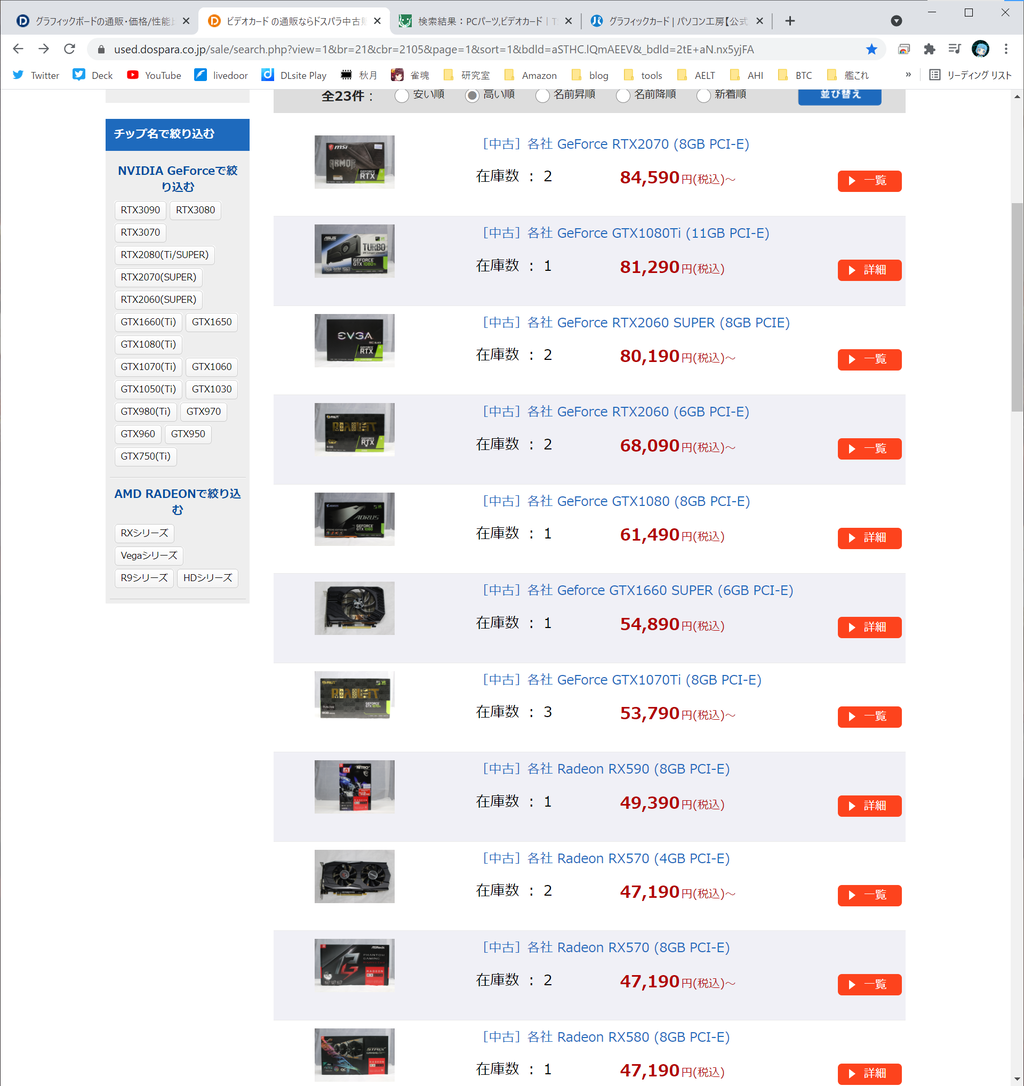
ちなみに自分が使っている構成とオーバークロック状態は↓の記事に乗っています。
平均しても月2万円ぐらいマイニングできます。